import cv2
from picamera2 import Picamera2
import time
import numpy as np
from servo import Servo
picam2 = Picamera2()
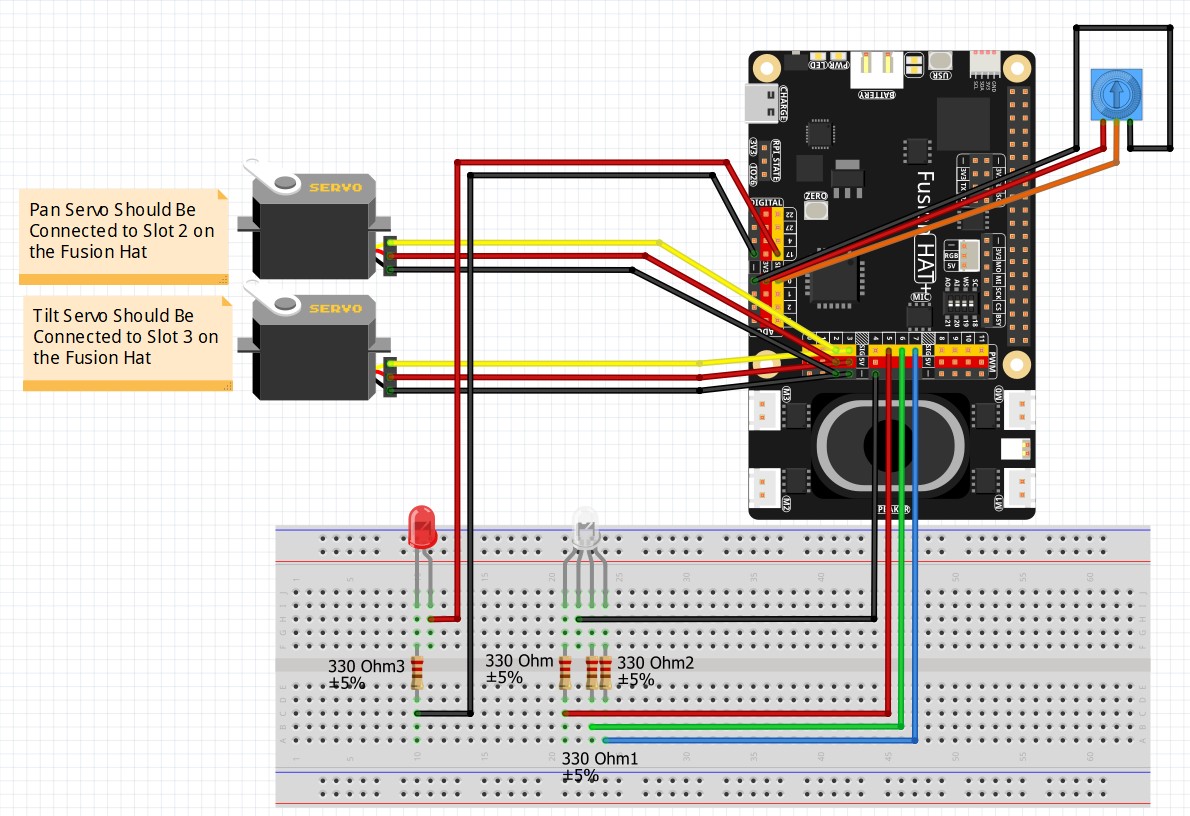
pan=Servo(pin=13)
tilt=Servo(pin=12)
panAngle=0
tiltAngle=0
pan.set_angle(panAngle)
tilt.set_angle(tiltAngle)
dispW=1280
dispH=720
picam2.preview_configuration.main.size = (dispW,dispH)
picam2.preview_configuration.main.format = "RGB888"
picam2.preview_configuration.controls.FrameRate=30
picam2.preview_configuration.align()
picam2.configure("preview")
picam2.start()
fps=0
pos=(30,60)
font=cv2.FONT_HERSHEY_SIMPLEX
height=1.5
weight=3
myColor=(0,0,255)
track=0
def onTrack1(val):
global hueLow
hueLow=val
print('Hue Low',hueLow)
def onTrack2(val):
global hueHigh
hueHigh=val
print('Hue High',hueHigh)
def onTrack3(val):
global satLow
satLow=val
print('Sat Low',satLow)
def onTrack4(val):
global satHigh
satHigh=val
print('Sat High',satHigh)
def onTrack5(val):
global valLow
valLow=val
print('Val Low',valLow)
def onTrack6(val):
global valHigh
valHigh=val
print('Val High',valHigh)
def onTrack7(val):
global track
track=val
print('Track Value',track)
cv2.namedWindow('myTracker')
cv2.createTrackbar('Hue Low','myTracker',10,179,onTrack1)
cv2.createTrackbar('Hue High','myTracker',20,179,onTrack2)
cv2.createTrackbar('Sat Low','myTracker',100,255,onTrack3)
cv2.createTrackbar('Sat High','myTracker',255,255,onTrack4)
cv2.createTrackbar('Val Low','myTracker',100,255,onTrack5)
cv2.createTrackbar('Val High','myTracker',255,255,onTrack6)
cv2.createTrackbar('Train-0 Track-1','myTracker',0,1,onTrack7)
while True:
tStart=time.time()
frame= picam2.capture_array()
frame=cv2.flip(frame,-1)
frameHSV=cv2.cvtColor(frame,cv2.COLOR_BGR2HSV)
cv2.putText(frame,str(int(fps))+' FPS',pos,font,height,myColor,weight)
lowerBound=np.array([hueLow,satLow,valLow])
upperBound=np.array([hueHigh,satHigh,valHigh])
myMask=cv2.inRange(frameHSV,lowerBound,upperBound)
myMaskSmall=cv2.resize(myMask,(int(dispW/2),int(dispH/2)))
myObject=cv2.bitwise_and(frame,frame, mask=myMask)
myObjectSmall=cv2.resize(myObject,(int(dispW/2),int(dispH/2)))
contours,junk=cv2.findContours(myMask,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
if len(contours)>0:
contours=sorted(contours,key=lambda x:cv2.contourArea(x),reverse=True)
#cv2.drawContours(frame,contours,-1,(255,0,0),3)
contour=contours[0]
x,y,w,h=cv2.boundingRect(contour)
cv2.rectangle(frame,(x,y),(x+w,y+h),(0,0,255),3)
if track==1:
error=(x+w/2)-dispW/2
panAngle=panAngle-error/75
if panAngle>90:
panAngle=90
if panAngle<-90:
panAngle=-90
if abs(error)>35:
pan.set_angle(panAngle)
tiltError=(y+h/2)-dispH/2
tiltAngle=tiltAngle+tiltError/75
if tiltAngle>40:
tiltAngle=40
if tiltAngle<-90:
tiltAngle=-90
if abs(tiltError)>35:
tilt.set_angle(tiltAngle)
cv2.imshow('Camera',frame)
cv2.imshow('Mask',myMaskSmall)
cv2.imshow('My Object',myObjectSmall)
if cv2.waitKey(1)==ord('q'):
break
tEnd=time.time()
loopTime=tEnd-tStart
fps=.9*fps + .1*(1/loopTime)
cv2.destroyAllWindows()