Hey guys, welcome back to the channel. If you’ve been following along, you know we’ve been pushing our hardware absolutely down into the dirt. We’ve been running large language models right on the edge, pushing our boards hot and heavy until the silicon is screaming and the thermal throttling flags are popping up all over the place.
But today, we are stepping away from the heavy-compute server terminals, and we are getting back to our roots: Real-Time Computer Vision and Embedded Control. In our previous lessons, we learned how to hook up our high-speed camera, capture raw frames, and interact with individual pixels using standard RGB/BGR math. But today, we are going to look under the hood of a completely different way of representing color: The HSV Color Space (Hue, Saturation, Value).
If you try to track objects or isolate specific colors in the traditional RGB world, you are going to pull your hair out. The moment a shadow hits your object or the room lighting changes, your Red, Green, and Blue values completely collapse. By shifting our mathematics into the HSV space, we can lock onto a color’s pure identity regardless of whether it is sitting under a bright laboratory spotlight or a dim shadow.
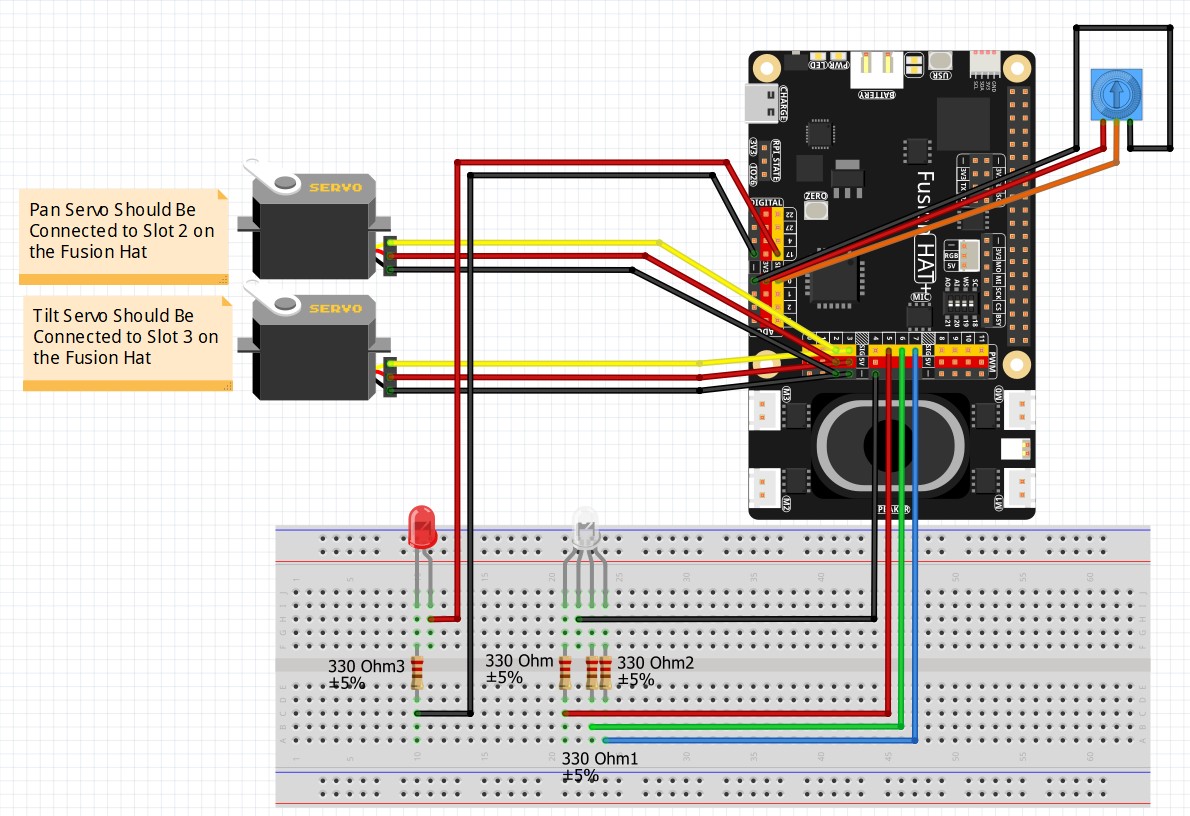
Not only are we going to capture and process these video streams at a smooth-as-silk 60 frames per second, but we are also going to translate that raw visual math directly into the physical world. We are using our trusty SunFounder Fusion HAT+ to dynamically pulse an external RGB LED, matching its brightness and color hue perfectly to whatever pixel your mouse is clicking on in real-time.
Let’s look at the blueprint to make this happen.
The Complete Python Code
Here is the clean, un-guardrailed Python script for today’s lesson. Paste this directly into your local terminal workspace. No bloated libraries, no unnecessary frameworks—just pure, deliberate engineering.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 |
import cv2 import time from picamera2 import Picamera2 from fusion_hat.pwm import PWM piCam = Picamera2() W=1280 H=720 tStart = time.time() fps = 0 redPin = 5 greenPin = 6 bluePin = 7 redLED = PWM(redPin) greenLED = PWM(greenPin) blueLED = PWM(bluePin) RES = (W,H) piCam.preview_configuration.main.size = RES piCam.preview_configuration.main.format = "RGB888" piCam.preview_configuration.controls.FrameRate=60 piCam.preview_configuration.align() piCam.configure("preview") piCam.start() textLowerLeft = (int(W*.01),int(H*.06)) fontFace = cv2.FONT_HERSHEY_SIMPLEX fontThickness = int(W/425) fontScale = H*.0015 fontColor = (0,0,255) xPos = 0 textLowerLeft1 = (int(W*.01),int(H*.06)*2) textLowerLeft2 = (int(W*.01),int(H*.06)*3) yPos = 0 valR = 0 valG = 0 valB = 0 Hue = 0 Sat = 0 Val = 0 LC = (40,50,75) UC = (54,255,255) frame = None def mouseAction(event, x, y, flags, param): global frame, xPos, yPos, Hue, Sat, Val if event == 0: xPos = x yPos = y if frame is not None: valB, valG, valR = frame[y,x] redLED.pulse_width_percent(int(valR/255*100)) greenLED.pulse_width_percent(int(valG/255*100/2)) blueLED.pulse_width_percent(int(valB/255*100/4)) frameHSV = cv2.cvtColor(frame,cv2.COLOR_BGR2HSV) Hue, Sat, Val =frameHSV[y,x] cv2.namedWindow('Camera',cv2.WINDOW_GUI_NORMAL) cv2.moveWindow('Camera',0,65) cv2.resizeWindow('Camera',W,H) cv2.namedWindow('Mask',cv2.WINDOW_GUI_NORMAL) cv2.moveWindow('Mask',W,65) cv2.resizeWindow('Mask',int(W/2),int(H/2)) cv2.namedWindow('Composite',cv2.WINDOW_GUI_NORMAL) cv2.moveWindow('Composite',W,65+int(H/2)+25) cv2.resizeWindow('Composite',int(W/2),int(H/2)) cv2.setMouseCallback('Camera',mouseAction) while True: deltaT = time.time() - tStart tStart=time.time() fps = fps*.95 + (1/deltaT)*.05 frame= piCam.capture_array() frame=cv2.flip(frame,-1) frameHSV = cv2.cvtColor(frame,cv2.COLOR_BGR2HSV) mask=cv2.inRange(frameHSV,LC,UC) composite = cv2.bitwise_and(frame, frame, mask=mask) myText = "FPS: "+str(round(fps,1)) cv2.putText(frame,myText,textLowerLeft,fontFace,fontScale,fontColor,fontThickness) text1 = "Mouse Pos: "+str((xPos,yPos)) text2 = "Pixel Color: "+str((Hue,Sat,Val)) cv2.putText(frame,text1,textLowerLeft1,fontFace,fontScale,fontColor,fontThickness) cv2.putText(frame,text2,textLowerLeft2,fontFace,fontScale,fontColor,fontThickness) cv2.imshow("Camera", frame) cv2.imshow("Composite",composite) cv2.imshow("Mask",mask) if cv2.waitKey(1)==ord('q'): break cv2.destroyAllWindows() redLED.pulse_width_percent(0) greenLED.pulse_width_percent(0) blueLED.pulse_width_percent(0) print('Program Terminated') |
Under the Hood: How the Code Works
1. The Real-Time Telemetry Smooth Filter
Look closely at how we calculate our frames-per-second metric inside the main processing loop:
|
1 |
fps = fps * .95 + (1 / deltaT) * .05 |
If you simply print out the raw math of 1 / deltaT, your numbers on the screen are going to jump all over the place like a wild animal. By applying a 95% historical weight and a 5% instant weight, we create a low-pass software filter that smoothly tracks our true hardware operational speed without erratic layout jitter.
2. The Mouse Vector and BGR Array Sequence
When your mouse triggers an event over the window, OpenCV passes us the standard coordinate pairs (x, y). But remember: inside a NumPy data structure, images are structured as Rows first, then Columns. That means when you slice into your image array to read a pixel’s color values, you must pass the parameters as frame[y, x]. If you pass it as [x, y], your program is going to index out of bounds and crash hard.
Furthermore, always remember that OpenCV handles colors in a BGR (Blue, Green, Red) sequence, not RGB. When we extract those elements, they unpack straight into valB, valG, valR.
3. Masking and Bitwise Isolation
To lock onto our target color, we use cv2.inRange() to look at our HSV frame and check it against our lower constraint (LC) and upper constraint (UC). This generates a Mask—a pure black-and-white image where pixels within the target color space are completely white (255), and everything else is completely black (0).
By taking that mask and running a fast bitwise operation
|
1 |
composite = cv2.bitwise_and(frame, frame, mask=mask) |
We force the computer to evaluate every single pixel. If the mask is zero, the output is blacked out. If the mask is active, the original, rich color information passes through perfectly, isolating our target object from the background noise instantly.
Get your circuits wired up, get this script running on your machine, and let me know in the comments section below what kind of performance numbers you are pulling on your local workbench. I’ll catch you guys in the next lesson!
Remember we are still setting the LED color to the color that cursor is pointing at. This is the circuit for connecting the RGB LED.