Simple Demonstration of IR Remote Control of Arduino
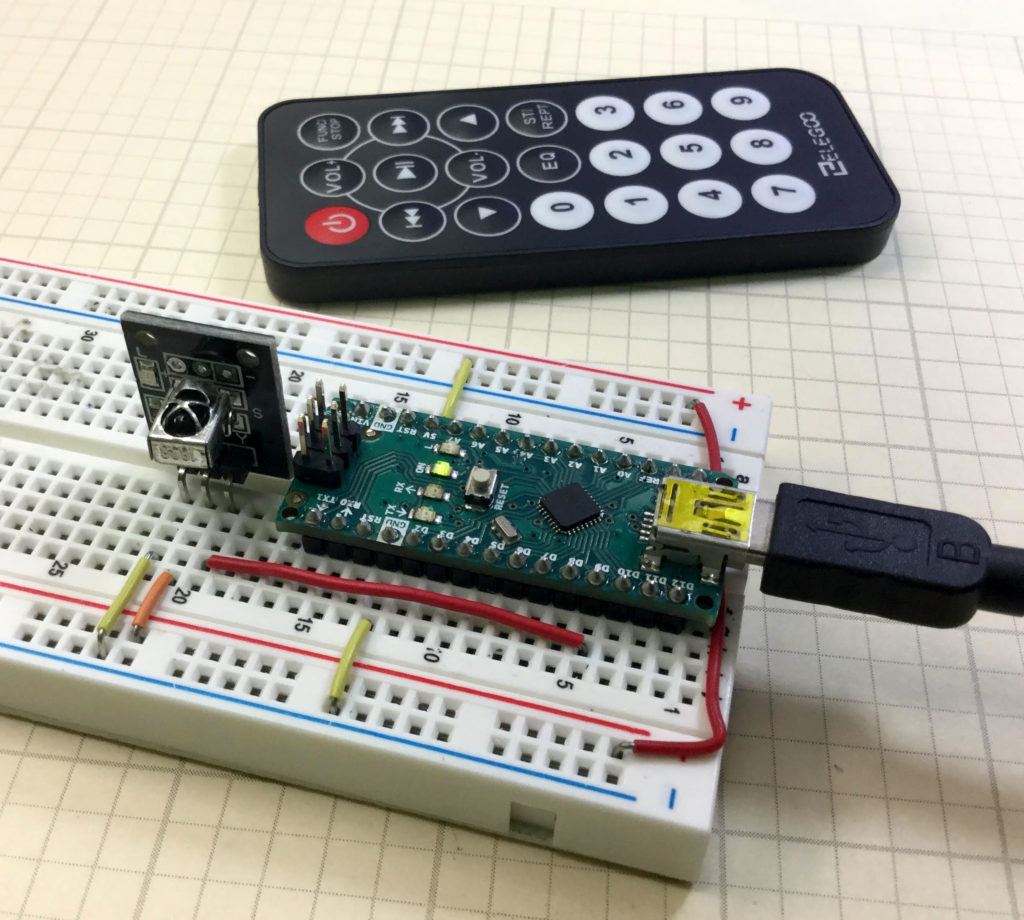
The Elegoo Kit contains a simple IR module and remote which allow you to add remote control to your arduino project. In this lesson we show you how to connect the remote, and then how to send signals to the arduino using the remote unit. This video takes you through the process step by step.
The code below will get you started, and then you can expand the code to map all the buttons to simple string commands.
Arduino
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
#include <IRremote.h> //Make sure to install the library
intIRpin=9;
IRrecvIR(IRpin);
decode_resultscmd;
StringmyCom;
voidsetup()
{
Serial.begin(9600);
IR.enableIRIn();
}
voidloop(){
while(IR.decode(&cmd)==0){
}
Serial.println(cmd.value,HEX);
delay(1500);
IR.resume();
if(cmd.value==0xFF6897){
myCom="zero";
Serial.println(myCom);
}
if(cmd.value==0xFFA25D){
myCom="pwr";
Serial.println(myCom);
}
}
We are building this with parts from our Elegoo Kit , and our actual build is using an Arduino Nano, which allows the project to be built on a single breadboard. You can get the neat jumper wires HERE.
Dimensional Analysis is one of the most important tools in the Engineers tool kit. In today’s lesson we take you through it step-by-step with example problems.
Dimensional Analysis is one of the most important tools used by practicing engineers and scientists, and allows you to convert from any set of units to any other set of units. It provides an a methodical method that takes the guess work out of conversions. This video takes you through the method step-by-step with several examples. The homework should be done before watching the next video.
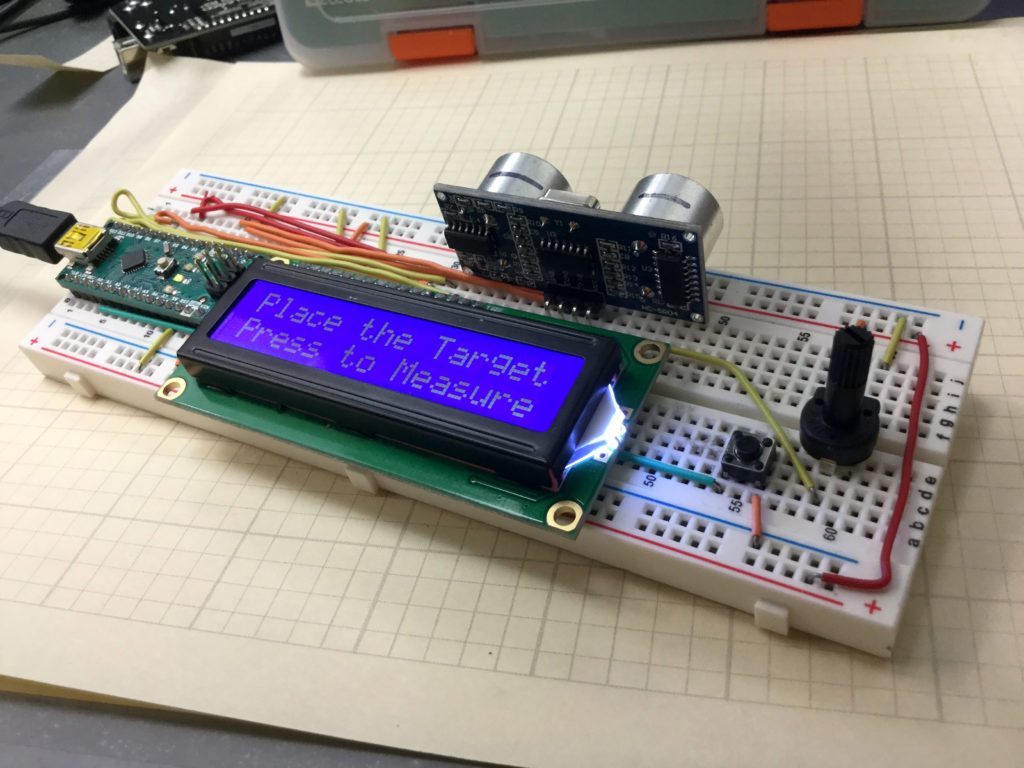
HC-SR04 Ultrasonic Sensor in a Distance Measuring Project
In this lesson we strive to improve the precision of our distance measurements using an average of a large number of measurements. This builds on the work we did in the last few lessons.
We are building this with parts from our Elegoo Kit , and our actual build is using an Arduino Nano, which allows the project to be built on a single breadboard. You can get the neat jumper wires HERE.
This video takes you through the process step-by-step.
The code developed in this video is included below for your convenience.
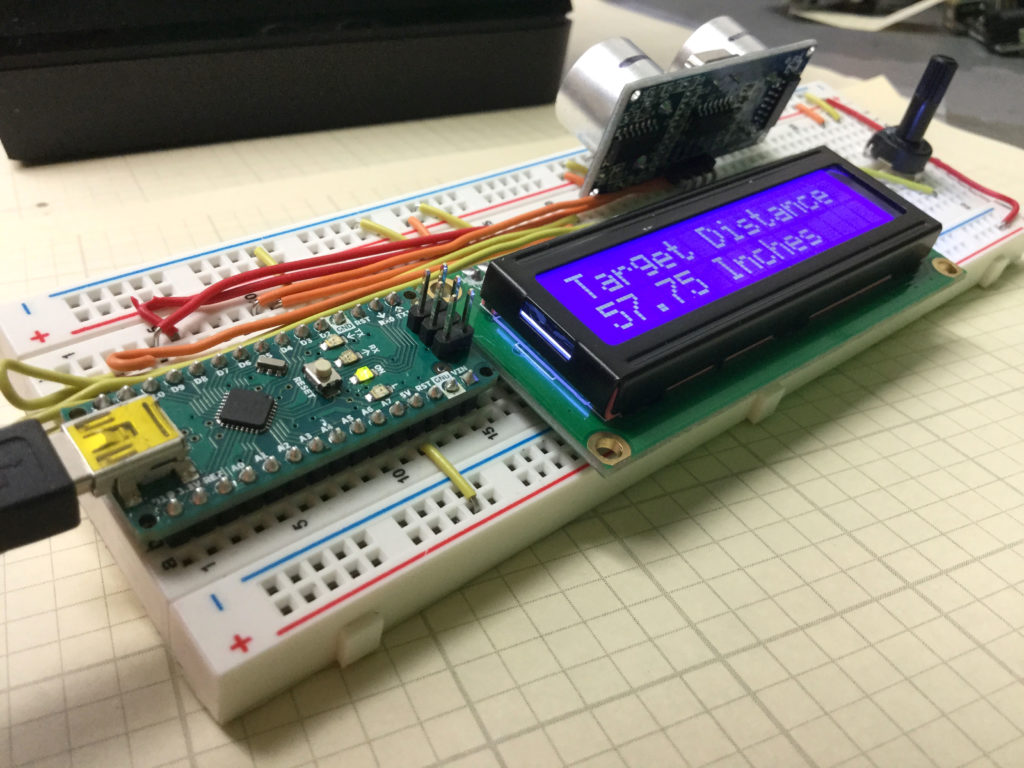
This is our completed build of a portable, ultrasonic distance sensor.
In this lesson we add a “GO” button to our portable distance measurement system. Note that from the work done in Lesson 59, we are only left with digital pin 13. The problem is that pin 13 is connected to the on-board diode, so trying to use pin 13 as a button pin will not work.
Never fear we can use one of the analog in pins. To use an analog in pin as the button pin, in the void setup, you need to declare the pin as an INPUT, and then digitalWrite the pin to HIGH. This will connect it to 5V through a pullup resistor. Now you just have to do a digital read to that pin. When button is untouched, you will read a “1”, and when you press the button, you will read a “0”.
We are building this with parts from our Elegoo Kit , so if you get this kit, you will be using the same hardware we are using.
A challenge with this project is to keep the build neat and compact, which is much easier if you use an Arduino Nano, which allows the project to be built on a single breadboard. The build neatness is also facilitated by using small straight jumper wires, which you can get HERE.
This video takes you through the explanation step-by-step:
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.Ok