import machine
import time
class LCD():
def __init__(self, addr=None, blen=1):
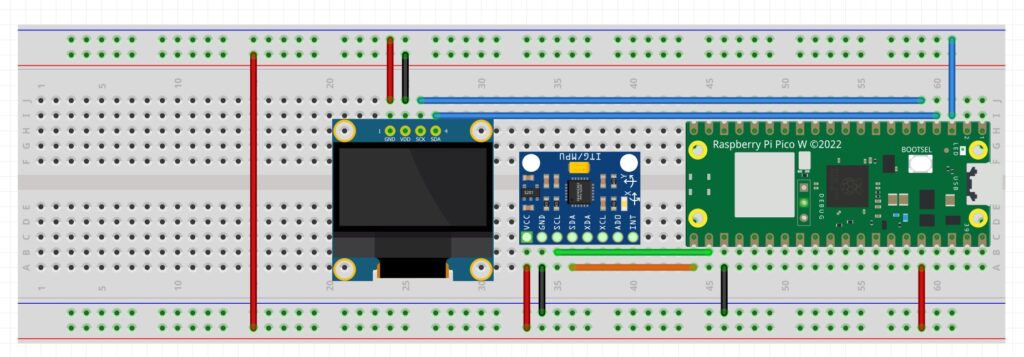
sda = machine.Pin(6)
scl = machine.Pin(7)
self.bus = machine.I2C(1,sda=sda, scl=scl, freq=400000)
#print(self.bus.scan())
self.addr = self.scanAddress(addr)
self.blen = blen
self.send_command(0x33) # Must initialize to 8-line mode at first
time.sleep(0.005)
self.send_command(0x32) # Then initialize to 4-line mode
time.sleep(0.005)
self.send_command(0x28) # 2 Lines & 5*7 dots
time.sleep(0.005)
self.send_command(0x0C) # Enable display without cursor
time.sleep(0.005)
self.send_command(0x01) # Clear Screen
self.bus.writeto(self.addr, bytearray([0x08]))
def scanAddress(self, addr):
devices = self.bus.scan()
if len(devices) == 0:
raise Exception("No LCD found")
if addr is not None:
if addr in devices:
return addr
else:
raise Exception(f"LCD at 0x{addr:2X} not found")
elif 0x27 in devices:
return 0x27
elif 0x3F in devices:
return 0x3F
else:
raise Exception("No LCD found")
def write_word(self, data):
temp = data
if self.blen == 1:
temp |= 0x08
else:
temp &= 0xF7
self.bus.writeto(self.addr, bytearray([temp]))
def send_command(self, cmd):
# Send bit7-4 firstly
buf = cmd & 0xF0
buf |= 0x04 # RS = 0, RW = 0, EN = 1
self.write_word(buf)
time.sleep(0.002)
buf &= 0xFB # Make EN = 0
self.write_word(buf)
# Send bit3-0 secondly
buf = (cmd & 0x0F) << 4
buf |= 0x04 # RS = 0, RW = 0, EN = 1
self.write_word(buf)
time.sleep(0.002)
buf &= 0xFB # Make EN = 0
self.write_word(buf)
def send_data(self, data):
# Send bit7-4 firstly
buf = data & 0xF0
buf |= 0x05 # RS = 1, RW = 0, EN = 1
self.write_word(buf)
time.sleep(0.002)
buf &= 0xFB # Make EN = 0
self.write_word(buf)
# Send bit3-0 secondly
buf = (data & 0x0F) << 4
buf |= 0x05 # RS = 1, RW = 0, EN = 1
self.write_word(buf)
time.sleep(0.002)
buf &= 0xFB # Make EN = 0
self.write_word(buf)
def clear(self):
self.send_command(0x01) # Clear Screen
def openlight(self): # Enable the backlight
self.bus.writeto(self.addr,bytearray([0x08]))
# self.bus.close()
def write(self, x, y, str):
if x < 0:
x = 0
if x > 15:
x = 15
if y < 0:
y = 0
if y > 1:
y = 1
# Move cursor
addr = 0x80 + 0x40 * y + x
self.send_command(addr)
for chr in str:
self.send_data(ord(chr))
def message(self, text):
#print("message: %s"%text)
for char in text:
if char == '\n':
self.send_command(0xC0) # next line
else:
self.send_data(ord(char))