In this lesson we show you our solution to the assignment in Lesson 48 to build a simple calculator with an LCD Output. The video steps you through the project build step-by-step.
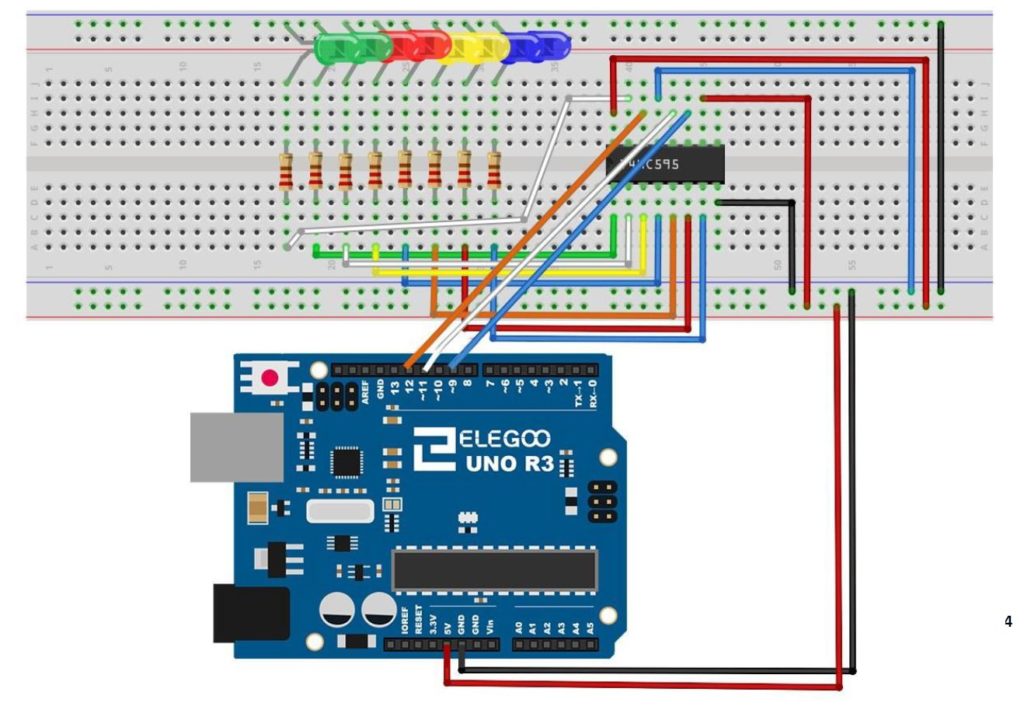
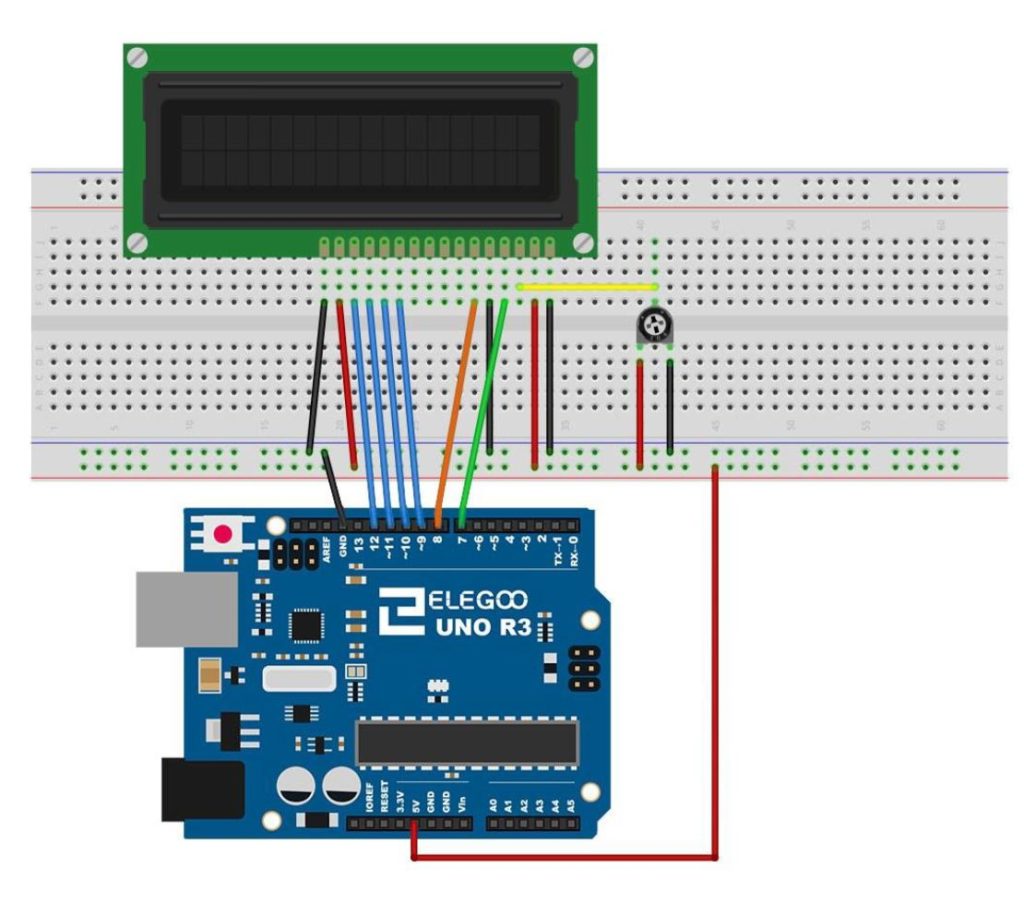
In the project, the following schematic is used.
An official Arduino Uno R3 is available HERE. In this new series of lessons, I will be using the sensor and other components found in this KIT.
And this is the code developed in the video.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 | #include <LiquidCrystal.h> int rs=7; int en=8; int d4=9; int d5=10; int d6=11; int d7=12; float firstNum; float secNum; float answer; String op; LiquidCrystal lcd(rs,en,d4,d5,d6,d7); void setup() { // put your setup code here, to run once: lcd.begin(16,2); Serial.begin(9600); } void loop() { lcd.setCursor(0,0); lcd.print("Input 1st Number"); while (Serial.available()==0){ } firstNum=Serial.parseFloat(); lcd.clear(); lcd.setCursor(0,0); lcd.print("Input 2nd Number"); while (Serial.available()==0){ } secNum=Serial.parseFloat(); lcd.clear(); lcd.setCursor(0,0); lcd.print("Input(+,-,*,/)"); while (Serial.available()==0){ } op=Serial.readString(); if (op=="+"){ answer=firstNum+secNum; } if (op=="-"){ answer=firstNum-secNum; } if (op=="*"){ answer=firstNum*secNum; } if (op=="/") { answer=firstNum/secNum; } lcd.clear(); lcd.setCursor(0,0); lcd.print(firstNum); lcd.print(op); lcd.print(secNum); lcd.print(" = "); lcd.print(answer); lcd.setCursor(0,1); lcd.print("Thank You"); delay(5000); lcd.clear(); } |