
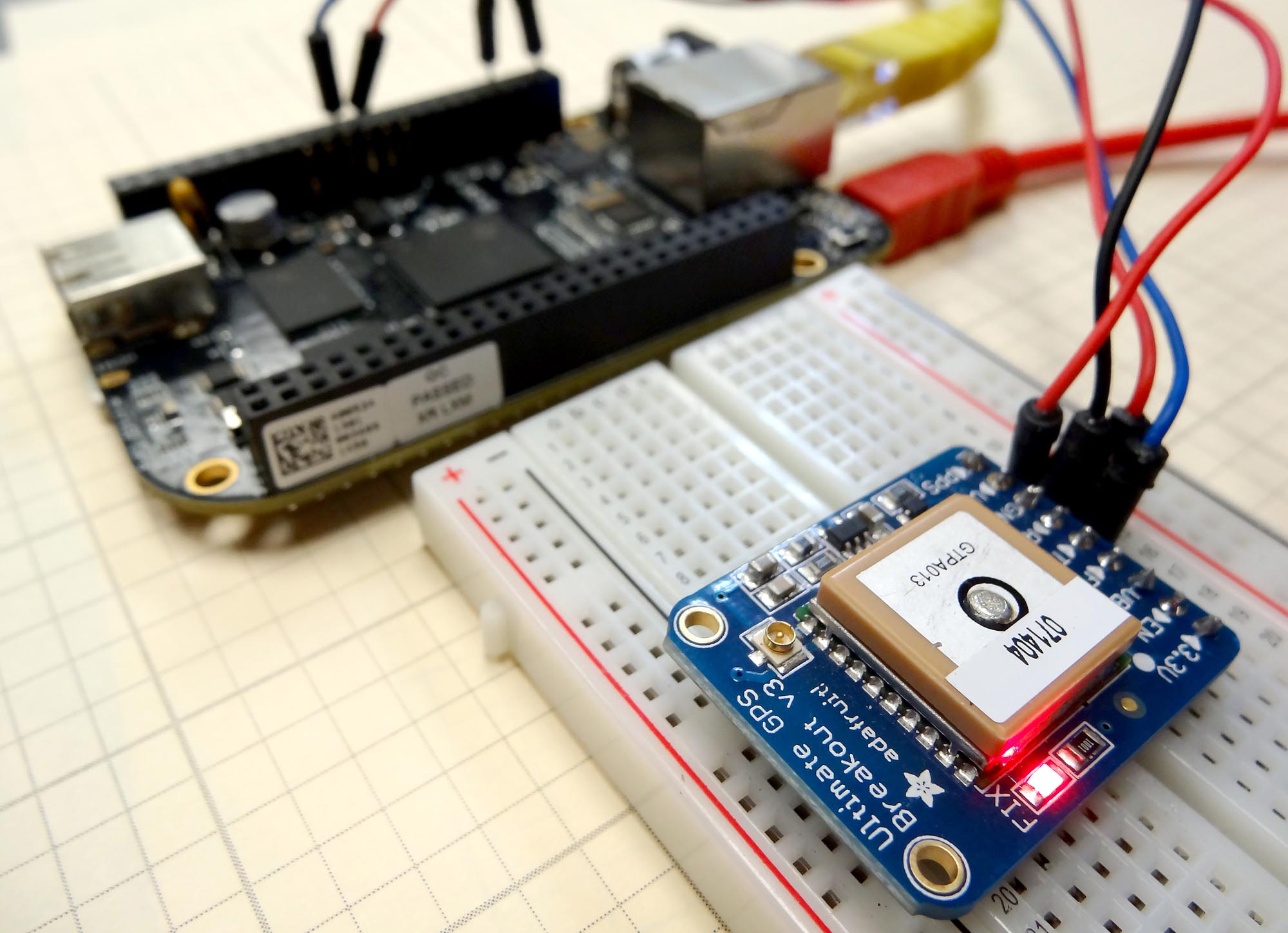
In the first two lessons in this series, you learned how to hook the Beaglebone Black to the Adafruit Ultimate GPS breakout board. We then learned to read NMEA sentences from the GPS, and how to control the data the GPS spits out. In this lesson we will learn to parse the NMEA sentences into useful data. You need to make sure you go back and review the first two lessons, as this one draws heavily on those. Also, you need to start with the code we had developed in LESSON 2. (If you need the gear we are using, you can get the Beaglebone Black HERE, and you can get the Adafruit GPS HERE.)
In this code we move most of the work up into our GPS class. That makes the main part of the program simple and intuitive to use.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 |
import serial import Adafruit_BBIO.UART as UART from time import sleep UART.setup("UART1") ser=serial.Serial('/dev/ttyO1',9600) class GPS: def __init__(self): #This sets up variables for useful commands. #This set is used to set the rate the GPS reports UPDATE_10_sec= "$PMTK220,10000*2F\r\n" #Update Every 10 Seconds UPDATE_5_sec= "$PMTK220,5000*1B\r\n" #Update Every 5 Seconds UPDATE_1_sec= "$PMTK220,1000*1F\r\n" #Update Every One Second UPDATE_200_msec= "$PMTK220,200*2C\r\n" #Update Every 200 Milliseconds #This set is used to set the rate the GPS takes measurements MEAS_10_sec = "$PMTK300,10000,0,0,0,0*2C\r\n" #Measure every 10 seconds MEAS_5_sec = "$PMTK300,5000,0,0,0,0*18\r\n" #Measure every 5 seconds MEAS_1_sec = "$PMTK300,1000,0,0,0,0*1C\r\n" #Measure once a second MEAS_200_msec= "$PMTK300,200,0,0,0,0*2F\r\n" #Meaure 5 times a second #Set the Baud Rate of GPS BAUD_57600 = "$PMTK251,57600*2C\r\n" #Set Baud Rate at 57600 BAUD_9600 ="$PMTK251,9600*17\r\n" #Set 9600 Baud Rate #Commands for which NMEA Sentences are sent ser.write(BAUD_57600) sleep(1) ser.baudrate=57600 GPRMC_ONLY= "$PMTK314,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*29\r\n" #Send only the GPRMC Sentence GPRMC_GPGGA="$PMTK314,0,1,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*28\r\n"#Send GPRMC AND GPGGA Sentences SEND_ALL ="$PMTK314,1,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0*28\r\n" #Send All Sentences SEND_NOTHING="$PMTK314,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*28\r\n" #Send Nothing ser.write(UPDATE_200_msec) sleep(1) ser.write(MEAS_200_msec) sleep(1) ser.write(GPRMC_GPGGA) sleep(1) ser.flushInput() ser.flushInput() print "GPS Initialized" def read(self): ser.flushInput() ser.flushInput() while ser.inWaiting()==0: pass self.NMEA1=ser.readline() while ser.inWaiting()==0: pass self.NMEA2=ser.readline() NMEA1_array=self.NMEA1.split(',') NMEA2_array=self.NMEA2.split(',') if NMEA1_array[0]=='$GPRMC': self.timeUTC=NMEA1_array[1][:-8]+':'+NMEA1_array[1][-8:-6]+':'+NMEA1_array[1][-6:-4] self.latDeg=NMEA1_array[3][:-7] self.latMin=NMEA1_array[3][-7:] self.latHem=NMEA1_array[4] self.lonDeg=NMEA1_array[5][:-7] self.lonMin=NMEA1_array[5][-7:] self.lonHem=NMEA1_array[6] self.knots=NMEA1_array[7] if NMEA1_array[0]=='$GPGGA': self.fix=NMEA1_array[6] self.altitude=NMEA1_array[9] self.sats=NMEA1_array[7] if NMEA2_array[0]=='$GPRMC': self.timeUTC=NMEA2_array[1][:-8]+':'+NMEA1_array[1][-8:-6]+':'+NMEA1_array[1][-6:-4] self.latDeg=NMEA2_array[3][:-7] self.latMin=NMEA2_array[3][-7:] self.latHem=NMEA2_array[4] self.lonDeg=NMEA2_array[5][:-7] self.lonMin=NMEA2_array[5][-7:] self.lonHem=NMEA2_array[6] self.knots=NMEA2_array[7] if NMEA2_array[0]=='$GPGGA': self.fix=NMEA2_array[6] self.altitude=NMEA2_array[9] self.sats=NMEA2_array[7] myGPS=GPS() while(1): myGPS.read() print myGPS.NMEA1 print myGPS.NMEA2 if myGPS.fix!=0: print 'Universal Time: ',myGPS.timeUTC print 'You are Tracking: ',myGPS.sats,' satellites' print 'My Latitude: ',myGPS.latDeg, 'Degrees ', myGPS.latMin,' minutes ', myGPS.latHem print 'My Longitude: ',myGPS.lonDeg, 'Degrees ', myGPS.lonMin,' minutes ', myGPS.lonHem print 'My Speed: ', myGPS.knots print 'My Altitude: ',myGPS.altitude |