
If you went through our series of 12 lessons on the Beaglebone black you should be familiar with the basics of this microcontroller. We are now ready to move on to more advanced projects. In our earlier lessons on the Arduino, we built a GPS data logger and integrated it with Google Earth using the Arduino Uno and the Adafruit Ultimate GPS Breakout Board. While that was a great project, we finally ran out of horsepower with the arduino, and what we could do was limited by the memory limitations on the Arduino. Also, it is very hard to parse strings in the Arduino IDE, so interpreting the NMEA sentences is a rather large challenge with the limited string functionality in Arduino.
Python on the other hand makes quick work of string manipulation and the Beaglebone Black has plenty of horsepower for any manipulation of the NMEA sentences we might want to do.
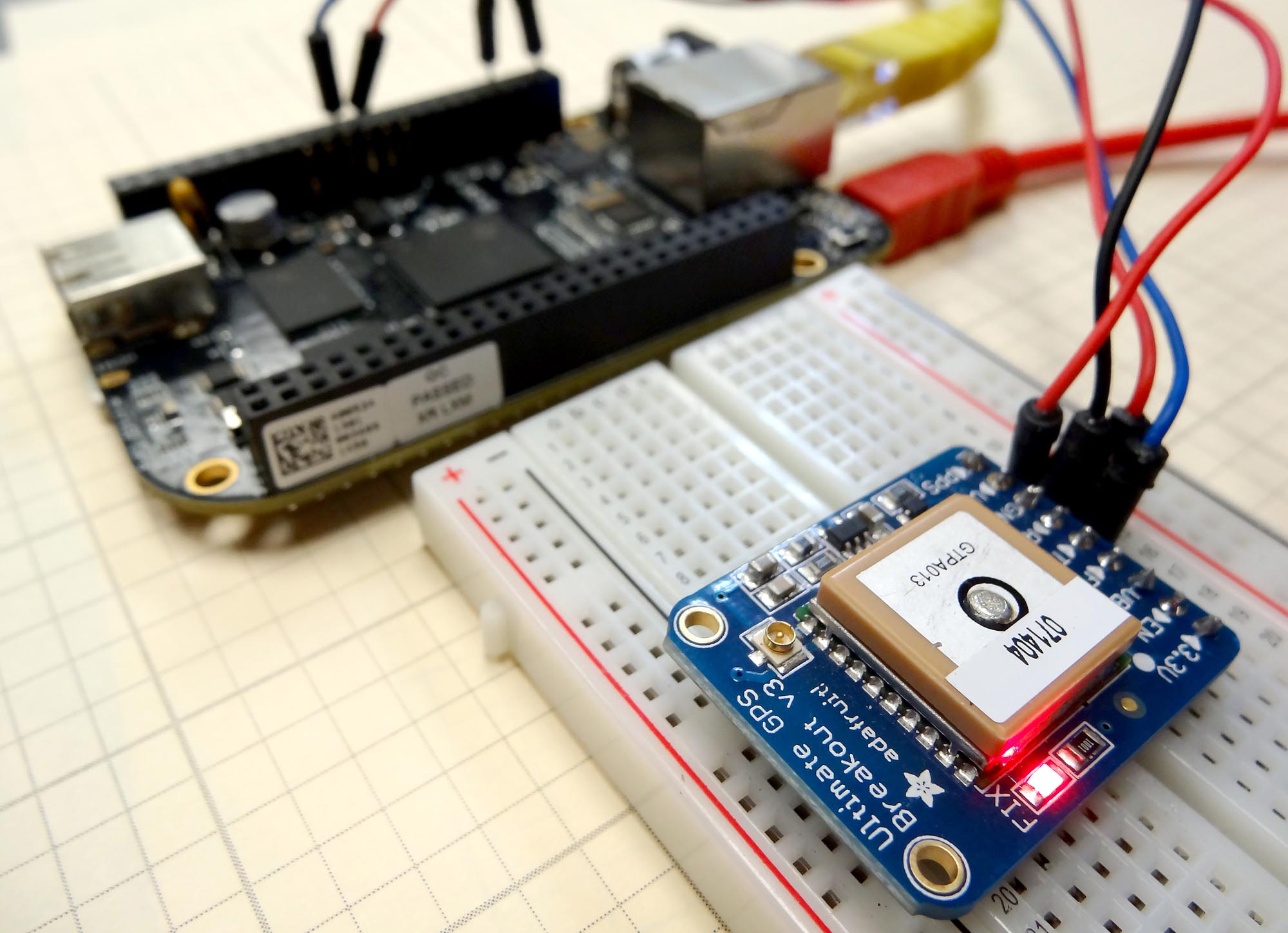
In order to play along with this project, you will need a Beaglebone Black Rev C, which you can get HERE, and the Adafruit Ultimate GPS which you can get HERE. The video below takes you through the project step-by-step, as well as the description below.
Once you get your gear, you will want to hook up the following circuit:

Note that we are working off header P9 and we are using P9_1 as ground, P9_7 as VIN, we are using P9_24 as Tx and P9_26 as Rx. Please note that you can see a detailed Diagram of the Beaglebone Black pinout HERE. Also notice that Tx on the Beaglebone is connected to Rx on the GPS, and Rx on the Beaglebone is connected to Tx on the GPS. Tx is like “talk” and Rx is like “listen, so you want to listen to the pin that is talking, and you want to talk to the pin that is listening.
Our goal in this first lesson is to establish a connection between the GPS and the Beaglebone, and to read in the data streaming from the GPS. We want to get a fix, and verify that we can read and print the NMEA sentences that contain the various position, altitude and velocity data.
The video takes you step-by-step through the code. The following simple code will get you streaming data from the GPS to your terminal window. In future lessons we will break the data down and show you how to get your position from the raw NMEA sentences streaming in.
|
1 2 3 4 5 6 7 8 9 |
import serial import Adafruit_BBIO.UART as UART UART.setup("UART1") GPS = serial.Serial('/dev/ttyO1', 9600) while(1): while GPS.inWaiting()==0: pass NMEA=GPS.readline() print NMEA |